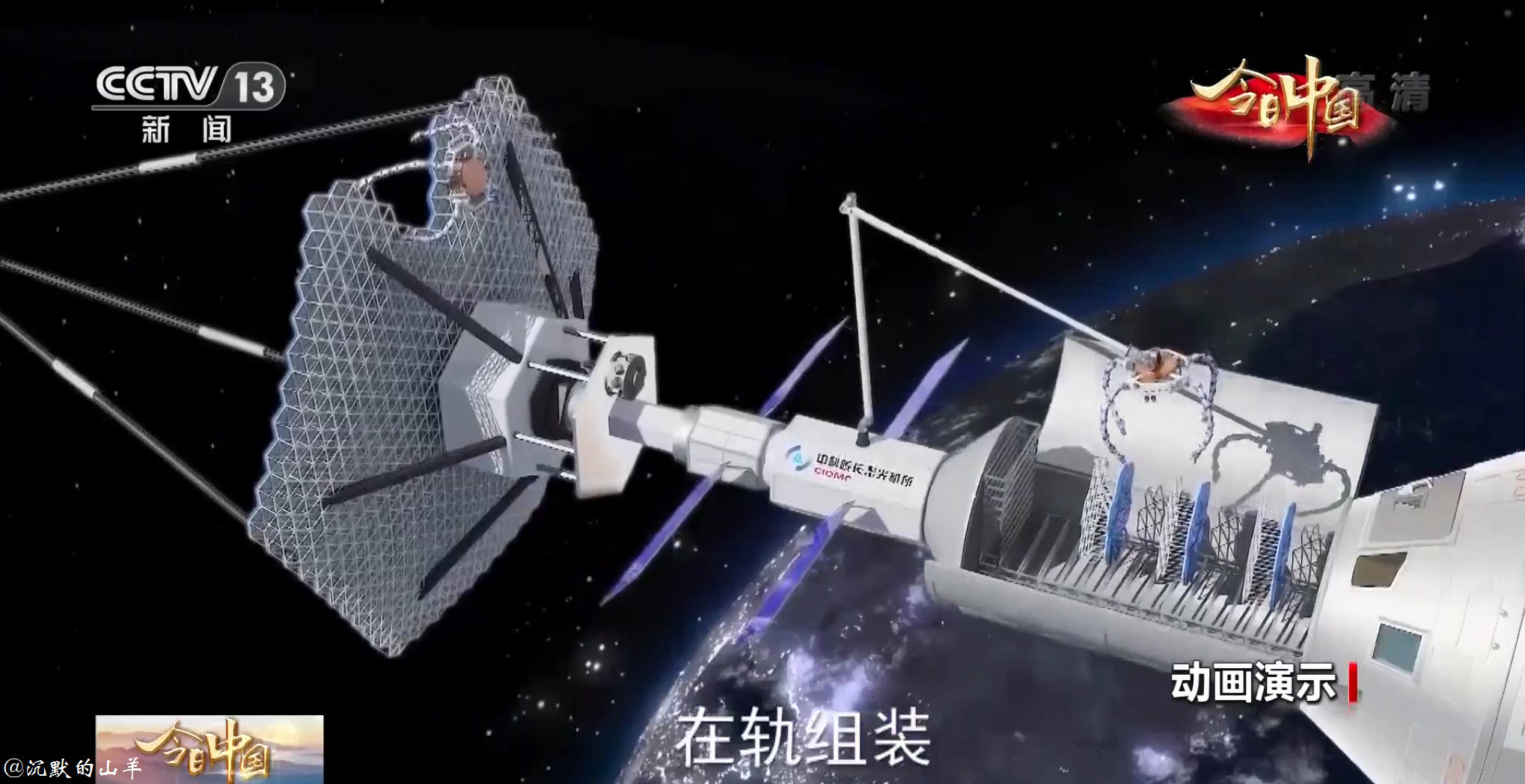
Are they going to put it on earth orbit or are they going to send it to lagrange point like JWST?China's large aperture space telescope has entered formal engineering stage. Deployment may begin as early as 2025. The telescope will be assembled in space.




You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
China's Space Program News Thread
- Thread starter crazyinsane105
- Start date
- Status
- Not open for further replies.
by78
General
Are they going to put it on earth orbit or are they going to send it to lagrange point like JWST?
I don't know.
JIUQUAN, May 19 (Xinhua) -- China sent a new ocean-monitoring satellite on Wednesday into orbit from the Jiuquan Satellite Launch Center in northwest China.
A Long March-4B rocket carrying the Haiyang-2D (HY-2D) satellite took off at 12:03 a.m. (Beijing Time), according to the launch center.
A Long March-4B rocket carrying the Haiyang-2D (HY-2D) satellite took off at 12:03 a.m. (Beijing Time), according to the launch center.
I`m in love, i want to marry her right now <3View attachment 72230
Brain and beauty in one package!
")
This is one of the most exciting forum section ever, one huge respect and congrats for China for all those astonishing acomplishments, great work, im looking forward for more amazing missions and advance in Chinese space exploration. Keep great work up, cheers!!
ps: im serious to marry this goddess!!
I stumbled across this link while looking for more info about the CSS Robotic Arm, and in particular the load capacity (weight) that can be handled by this robotic arm -- have not found the exact number, but I guess it should be able to handle payload up to 20-22 tons in order to move the additional modules around.The primary reason IMO is that the docking is on the side rather than on the same axis of orbital movement. Auto docking to the side is the approaching module pushing the other (the main complex) off the orbit. That will make the combined complex off course which need to be corrected by firing rocket to the opposite direction. It is just too dangerous and fuel consuming.
On the other hand in the current practice, the initial axis docking will slow down the complex, but regaining the velocity is much easier because of the built in orbit maintain mechanism. Afterwards, using robotic arm to swing the already physically connected docking module will not change the momentum therefor no orbit correction needed.
Anyhow here's some interesting reading:
An Overview of the Space Robotics Progress in China
In China, early robot research for space exploration started from 90’s. Intensive investigation of space robot was initiated from 2000 and a great number of special funds were assigned on the space robot projects. In this paper, after briefing the China’s Manned Space Engineering (CMSE) and the Chang'e Lunar Exploration Project (CLEP), we elaborate to present the current developing status of the Chinese Space Station Remote Manipulator System (CSSRMS) and the Yutu Rover, as well as to give prospective about the China’s space robot development in the future, especially, for a robot astronaut.
China’s manned space station, namely Tiangong, will have been built by 2021. It consists of one core module (CM), two experimental modules (EM), and one cargo spaceship. These modules will be assembled on orbit by using a remote robot manipulator system consisting of a big arm (10m) and a small arm (5m).
From the view of the successful application of Canada and Japanese manipulators in the ISS, it is found that these space robots primarily have the following technical characteristics:
• Cooperative work of two manipulators
• Ability of crawl moving
• High-tolerance capturing ability
• Modular design of core parts
• Necessary safety consideration
It has been well noticed that the single manipulator is hard to independently complete various operating tasks on the space station. Thus, mutual manipulation and collaborative work of manipulators with different sizes and functions are necessary.
The space manipulator needs to complete tasks as module transposition, full-range payload care, astronaut EVA activities, outside check of the module, and equipment transportation and installation. The experimental payload primarily includes exposed experimental platform on experimental module I and optical platform on experimental module II. In this large range (about 17m), taking care of all payloads requires the manipulator has long length and high end precision.
In consideration of launching power, space limitation and end operating task, the China space station manipulator was configured as a dual-arm setting (10m+5m): the big manipulator completes the manipulation with heavy payload and relatively low accuracy requirement in broad range; while the small manipulator completes the manipulation with high accuracy in narrow operating space. The big manipulator is installed to the space station core module (termed as core module manipulator, CMM); and the small manipulator is located to the experimental modules I or II (termed as experimental module manipulator, EMM) and able to be transferred between these two modules with the assistance of the big manipulator.
Functions of the big manipulator are primarily to transpose module, care payload of core module, carry cargo, and assist the small manipulator for conducting astronaut EVA activities in the range of all modules.
The small manipulator is able to work independently on the experimental module I and II, so as to look after the exposed experimental platform and optical platform, module check and EVA activity support, as shown in Fig. 2.
Another feasible configuration is that the small manipulator is located to the end of the big manipulator to compose a series-connected manipulator system with length of 15m, as shown in Fig. 3.In accordance with the required operation tasks, we provide some core specifications for the China space station manipulator, as shown in Table 1.
The EMM is a 7-DOF (degrees of freedom) robot arm system, wherein its 2 wrist parts have total 6 DOF’s (each has 3 DOF’s) and the elbow joint has 1 DOF. Both ends of the EMM are installed with an end-effector, respectively, which is configured with hand eye cameras and elbow cameras.
(…)
Authored by Hong Liu, State Key Laboratory of Robotics and System, Harbin Institute of Technology
(7 pages, 625 kb)
Sorry, please note that the surname is LIU (I should have written it as Hong LIU, or simply as LIU Hong as I prefer the latter in writing out the Chinese name, at least capitalize the surname to avoid any confusion or ambiguity.I stumbled across this link while looking for more info about the CSS Robotic Arm, and in particular the load capacity (weight) that can be handled by this robotic arm -- have not found the exact number, but I guess it should be able to handle payload up to 20-22 tons in order to move the additional modules around.
Anyhow here's some interesting reading:
An Overview of the Space Robotics Progress in China
In China, early robot research for space exploration started from 90’s. Intensive investigation of space robot was initiated from 2000 and a great number of special funds were assigned on the space robot projects. In this paper, after briefing the China’s Manned Space Engineering (CMSE) and the Chang'e Lunar Exploration Project (CLEP), we elaborate to present the current developing status of the Chinese Space Station Remote Manipulator System (CSSRMS) and the Yutu Rover, as well as to give prospective about the China’s space robot development in the future, especially, for a robot astronaut.
China’s manned space station, namely Tiangong, will have been built by 2021. It consists of one core module (CM), two experimental modules (EM), and one cargo spaceship. These modules will be assembled on orbit by using a remote robot manipulator system consisting of a big arm (10m) and a small arm (5m).
From the view of the successful application of Canada and Japanese manipulators in the ISS, it is found that these space robots primarily have the following technical characteristics:
• Cooperative work of two manipulators
• Ability of crawl moving
• High-tolerance capturing ability
• Modular design of core parts
• Necessary safety consideration
It has been well noticed that the single manipulator is hard to independently complete various operating tasks on the space station. Thus, mutual manipulation and collaborative work of manipulators with different sizes and functions are necessary.
The space manipulator needs to complete tasks as module transposition, full-range payload care, astronaut EVA activities, outside check of the module, and equipment transportation and installation. The experimental payload primarily includes exposed experimental platform on experimental module I and optical platform on experimental module II. In this large range (about 17m), taking care of all payloads requires the manipulator has long length and high end precision.
In consideration of launching power, space limitation and end operating task, the China space station manipulator was configured as a dual-arm setting (10m+5m): the big manipulator completes the manipulation with heavy payload and relatively low accuracy requirement in broad range; while the small manipulator completes the manipulation with high accuracy in narrow operating space. The big manipulator is installed to the space station core module (termed as core module manipulator, CMM); and the small manipulator is located to the experimental modules I or II (termed as experimental module manipulator, EMM) and able to be transferred between these two modules with the assistance of the big manipulator.
Functions of the big manipulator are primarily to transpose module, care payload of core module, carry cargo, and assist the small manipulator for conducting astronaut EVA activities in the range of all modules.
The small manipulator is able to work independently on the experimental module I and II, so as to look after the exposed experimental platform and optical platform, module check and EVA activity support, as shown in Fig. 2.
Another feasible configuration is that the small manipulator is located to the end of the big manipulator to compose a series-connected manipulator system with length of 15m, as shown in Fig. 3.In accordance with the required operation tasks, we provide some core specifications for the China space station manipulator, as shown in Table 1.
The EMM is a 7-DOF (degrees of freedom) robot arm system, wherein its 2 wrist parts have total 6 DOF’s (each has 3 DOF’s) and the elbow joint has 1 DOF. Both ends of the EMM are installed with an end-effector, respectively, which is configured with hand eye cameras and elbow cameras.
(…)
Authored by Hong Liu, State Key Laboratory of Robotics and System, Harbin Institute of Technology
(7 pages, 625 kb)


- Status
- Not open for further replies.