Some illustrations from a study titled
.
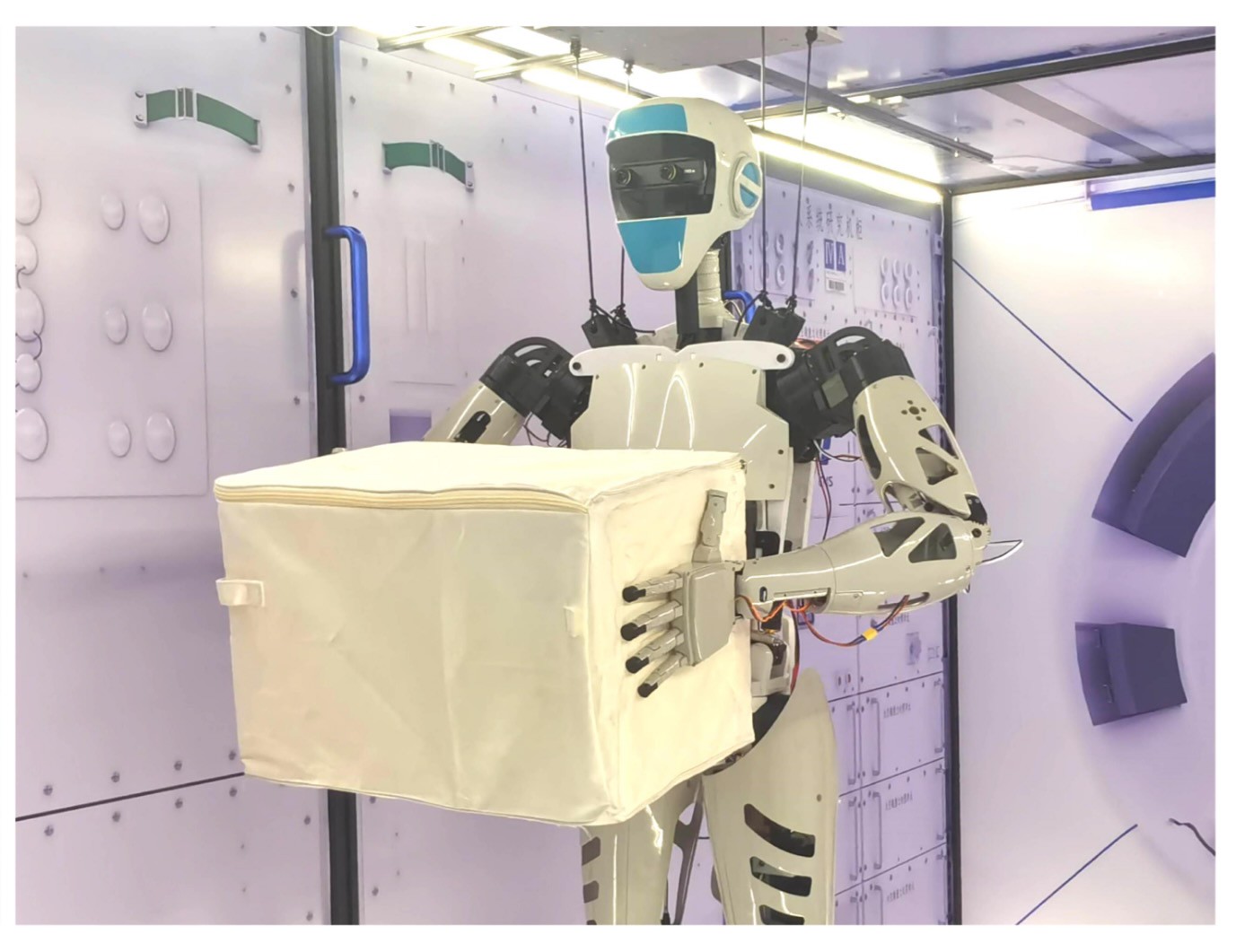
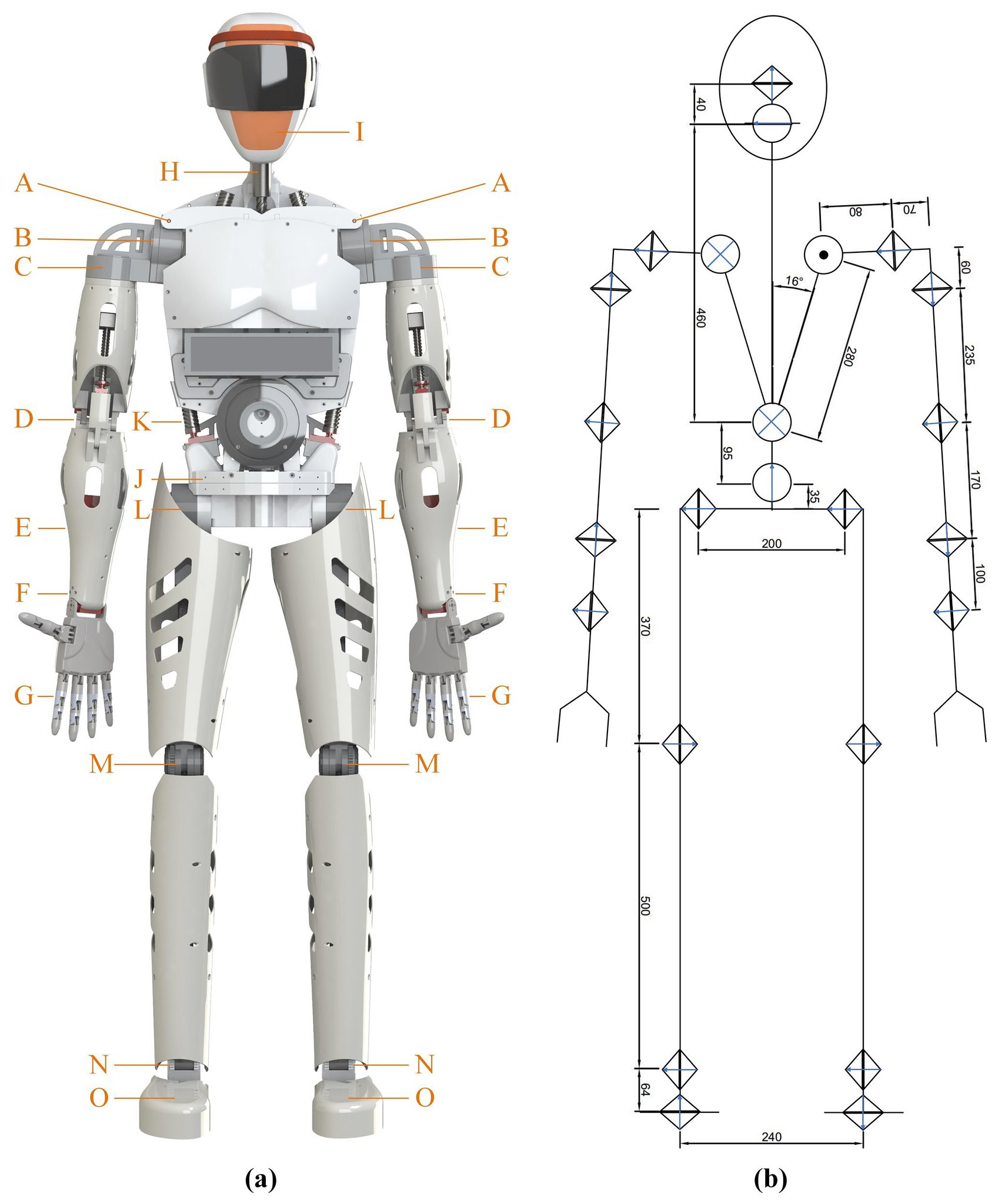
Some features and specifications of the taikobot:
- Light-weight and compact (~25kg), designed to work in microgravity environments.
- Height: 1.71m
- Anthropomorphic arms with six-degrees-of-freedom
- Smart hands with 15-degrees-of-freedom
- The torso has 2-degrees-of freedom
- Legs have 4-degrees-of-freedom
- The head is mounted on a gimbal
Abstract: This paper proposes a full-size and free-flying humanoid robot named Taikobot that aims to assist astronauts in a space station and maintain spacecrafts between human visits. Taikobot adopts a compact and lightweight (∼25 kg) design to work in microgravity, which also reduces launch costs and improves safety during human–robot collaboration. Taikobot’s anthropomorphic dual arm system and zero-g legs allow it to share a set of intravehicular human–machine interfaces. Unlike ground-walking robots, Taikobot maneuvers in a novel push–flight–park (PFP) strategy as an equivalent astronaut in a space station to maximize workspace and flexibility. We propose a PFP motion planning and control method based on centroidal dynamics and multi-contact model. Based on the proposed method, we carried out extensive simulations and verified the feasibility and advantages of the novel locomotion strategy. We also developed a prototype of Taikobot and carried out several ground experiments on typical scenarios where the robot collaborates with human astronauts. The experiments show that Taikobot can do some simple and repetitive tasks along with astronauts and has the potential to help astronauts improve their onboard working efficiency.